Stochastic Gradient Descent
1 深度网络训练与优化问题¶
课件链接:
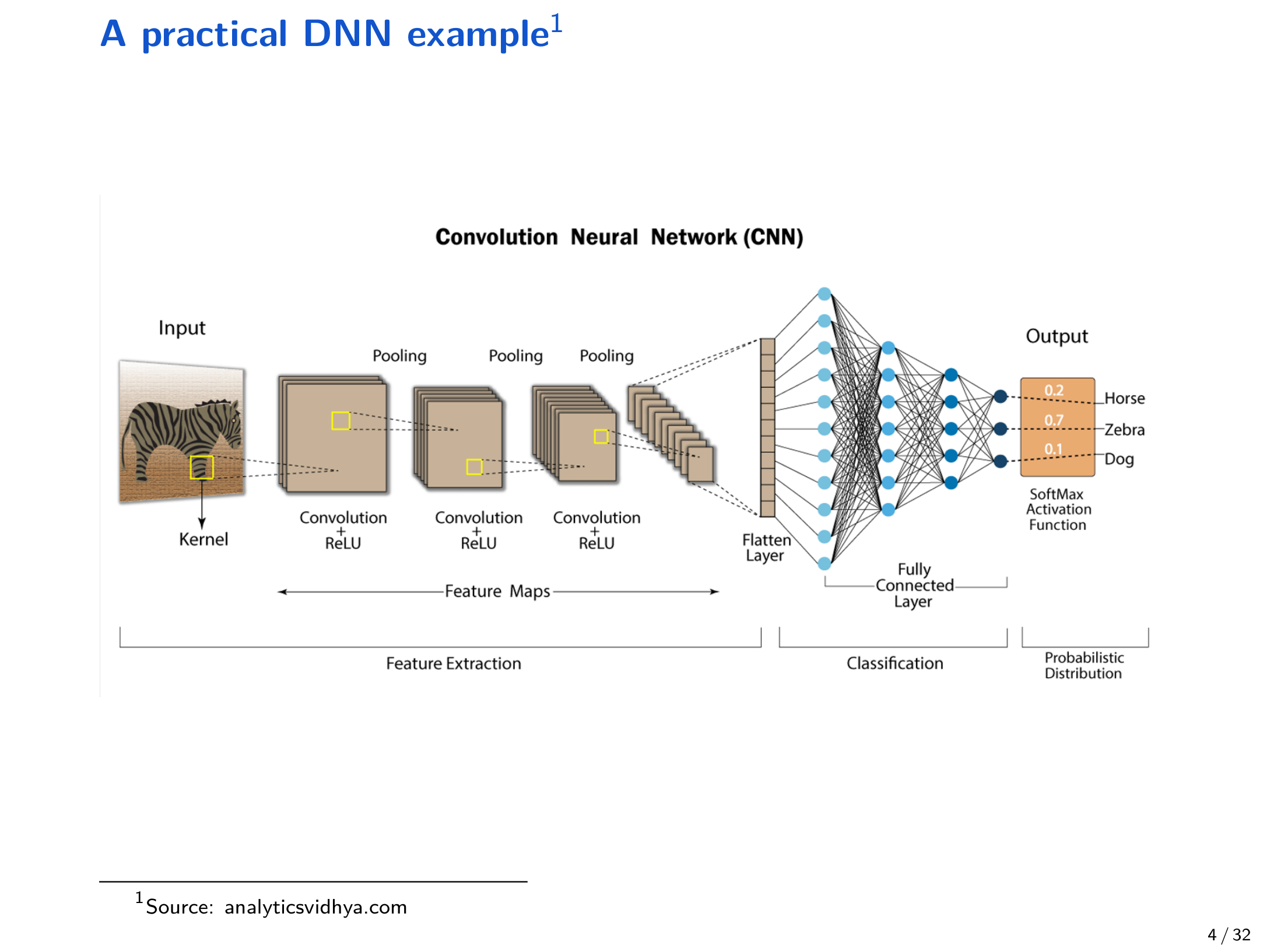
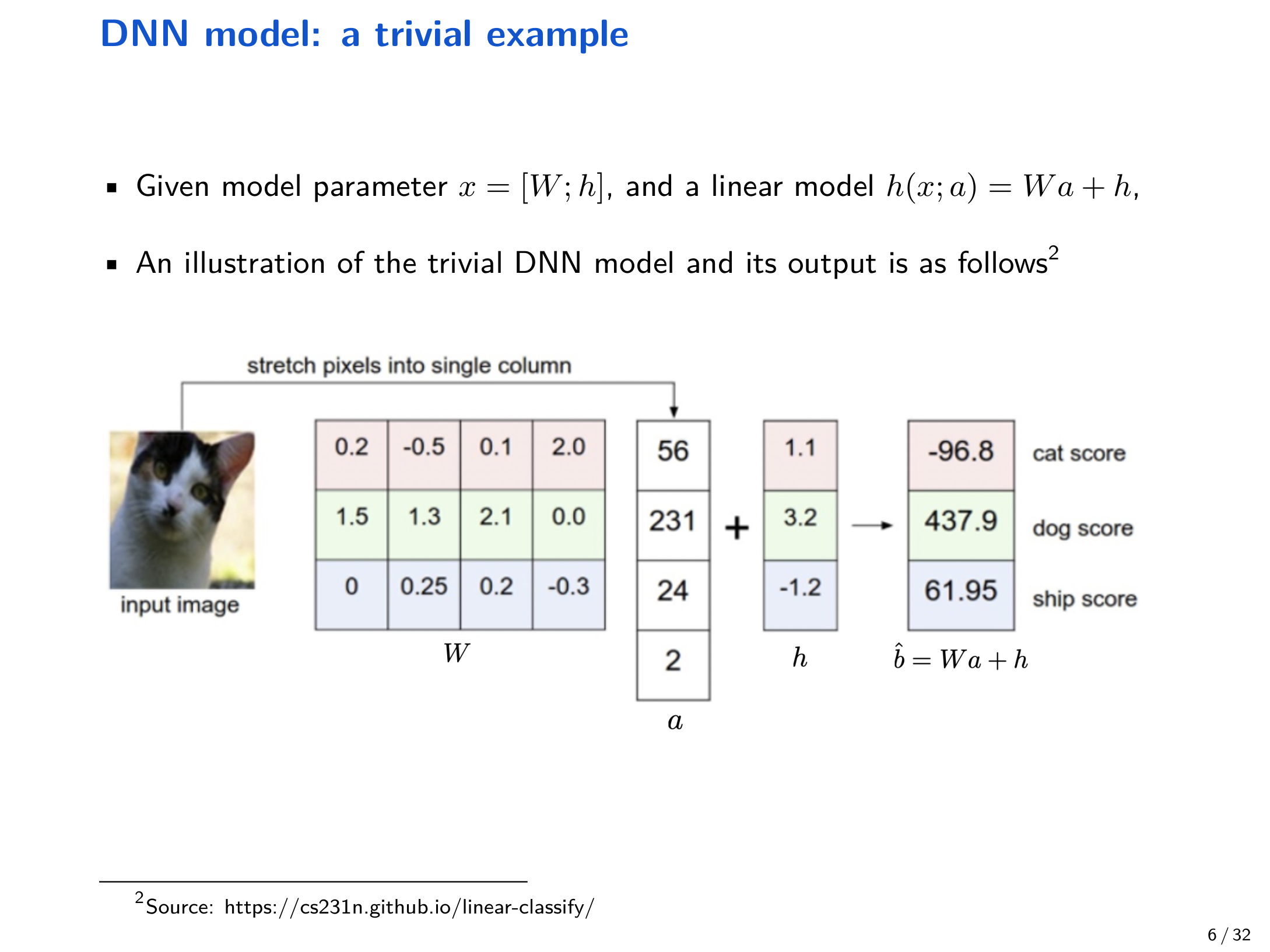
在深度学习中,我们通常把一个深度神经网络(DNN)看作由两部分组成:特征提取器与分类器。给定输入样本 \(a\),模型参数为 \(x\),网络输出预测分数 \(\hat b = h(x; a)\),再用损失函数 \(L(\hat b, b)\) 衡量预测与真实标签 \(b\) 的差异。
1.1 DNN 训练的经验风险最小化(ERM)¶
给定数据集 \(\{(a_i, b_i)\}_{i=1}^m\),DNN 训练常写成有限和(finite-sum)问题:
1.2 为什么 DNN 难训练¶
讲义强调了几个关键难点:
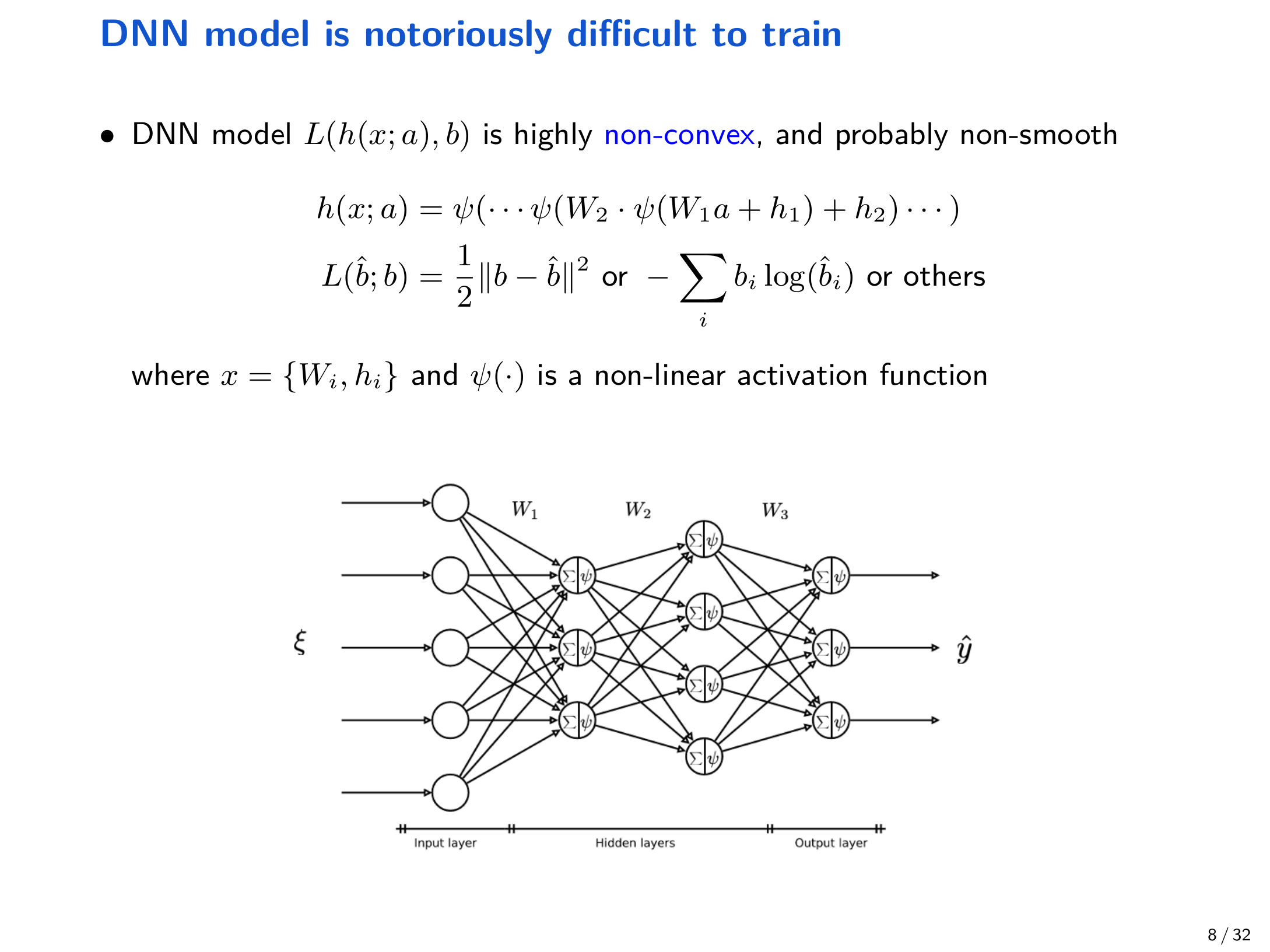
- 目标高度非凸:\(L(h(x;a), b)\) 对参数 \(x\) 通常是高度非凸的,甚至可能非光滑
- 参数维度巨大:\(x=\{W_i, h_i\}\) 维度很大
- 数据量巨大:训练集规模 \(m\) 往往很大
其中一个典型的“深层嵌套非线性”结构可以写成:
损失函数可以是平方损失 \(\frac{1}{2}\lVert b-\hat b\rVert^2\)、交叉熵 \(-\sum_i b_i \log(\hat b_i)\) 等。
因此 DNN 训练可以概括为非凸优化 + 高维 + 大规模数据。
这直接推动了随机优化(stochastic optimization)与随机梯度方法(SGD)的使用。
2 随机优化建模:从有限和到期望形式¶
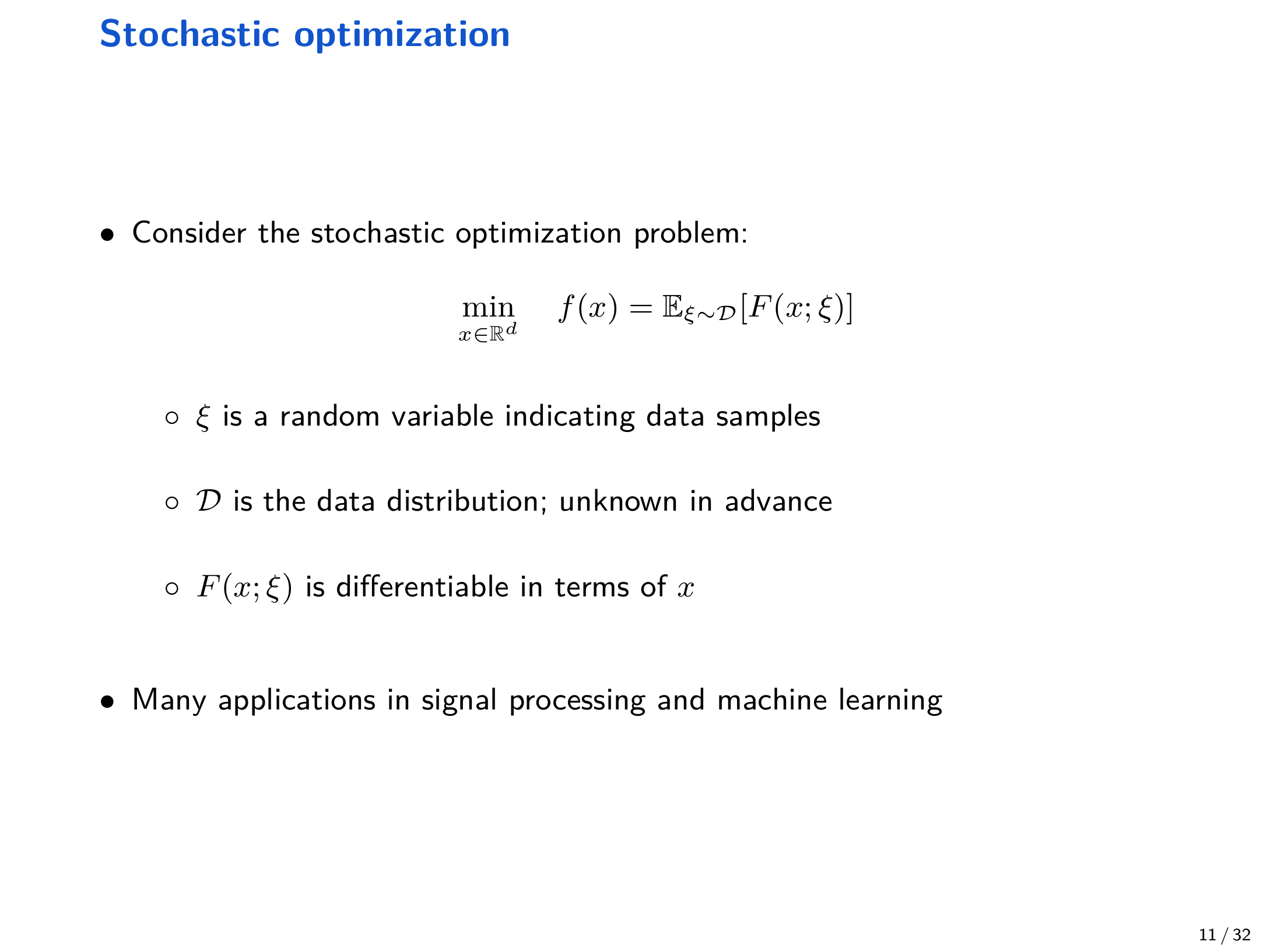
当数据来自未知分布 \(D\)(machine learning 里常见),可把训练目标写成期望形式:
其中随机变量 \(\xi\) 表示一次数据采样(例如 \((a,b)\)),\(F(x;\xi)\) 对 \(x\) 可微,但 \(D\) 未知,导致 \(f(x)\) 通常没有闭式表达。
2.1 DNN 训练作为随机优化的特例¶
如果我们认为存在无限数据 \((a,b)\sim D\),则经验风险可被视作期望风险:
3 随机梯度下降(SGD)¶
3.1 算法形式¶
因为 \(f(x)\) 没有闭式表达,我们通常无法直接计算 \(\nabla f(x)\),但可以在采样 \(\xi_k\) 后计算随机梯度 \(\nabla F(x_k;\xi_k)\) 来近似真实梯度。
SGD 的迭代为:
其中 \(\gamma>0\) 为学习率(learning rate),\(\xi_k\sim D\) 为第 \(k\) 次迭代采样的数据。
由于每一步采样 \(\xi_k\) 都是随机变量,迭代序列 \(\{x_k\}\) 本身也是随机过程;因此收敛分析通常以期望形式给出界。
3.2 过滤族(filtration)与随机性建模¶
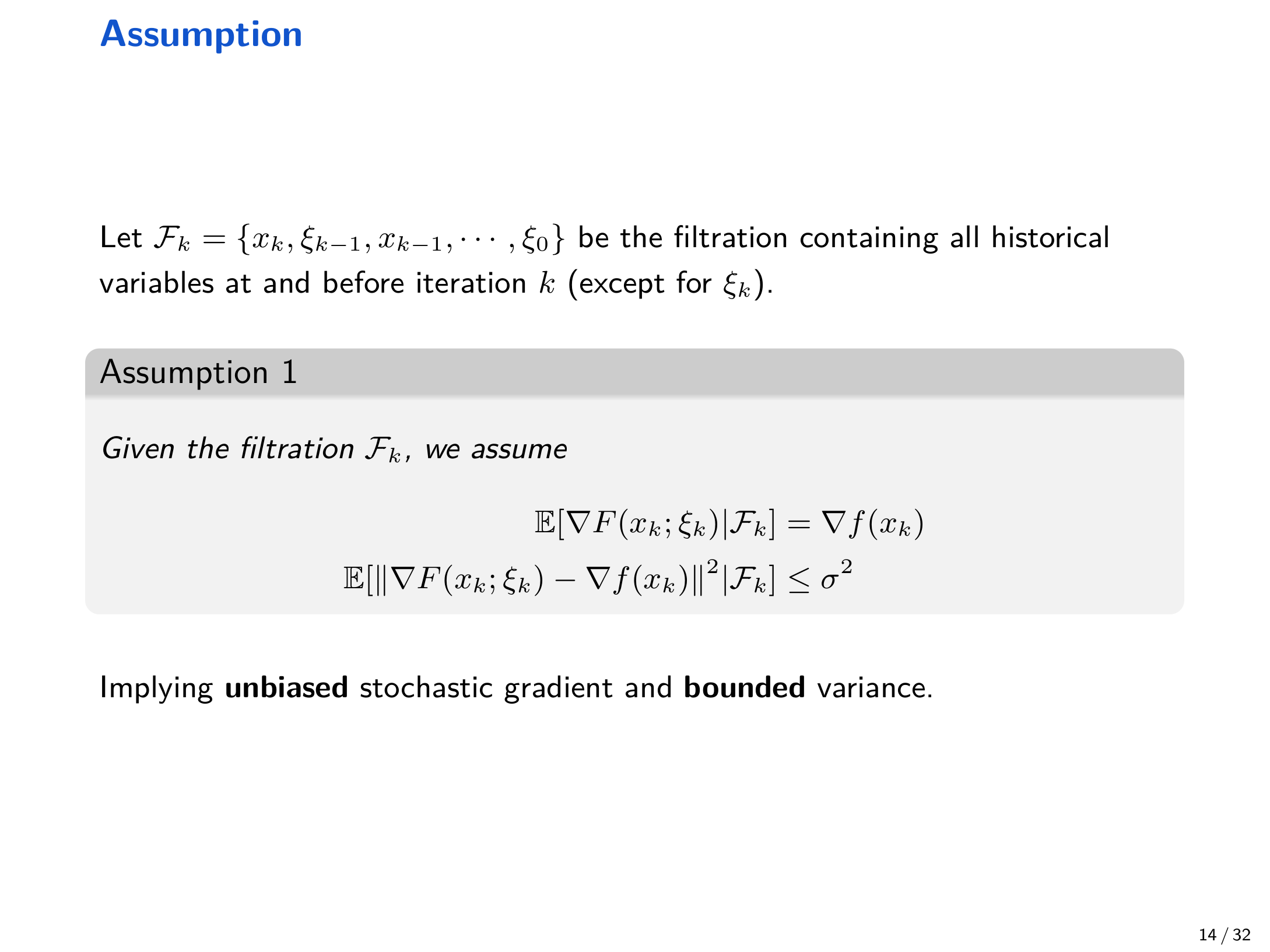
为了严谨讨论“条件期望”,引入过滤族:
它包含迭代 \(k\) 之前的全部历史信息(注意 \(\xi_k\notin \mathcal{F}_k\))。
假设 3.1(无偏 + 有界方差)
给定过滤族 \(\mathcal{F}_k\),假设
这表示随机梯度是无偏估计,并且条件方差被常数 \(\sigma^2\) 上界。
Filtration 与两个核心假设的直观理解
\(x_k\) 表示迭代到第 \(k\) 步时优化的参数。
Filtration \(\mathcal{F}_k\): 表示第 \(k\) 步时的历史信息,包含初始点 \(x_0\)、历史随机样本 \(\xi_0,\dots,\xi_{k-1}\) 及对应迭代点 \(x_1,\dots,x_k\)。关键在于:\(x_k\) 是已确定的,而当前随机样本 \(\xi_k\) 是未知的——这在数学上严格表达了"给定当前位置 \(x_k\) 时"的条件。
假设 1(无偏估计): \(\mathbb{E}[\nabla F(x_k;\xi_k)\mid\mathcal{F}_k]=\nabla f(x_k)\)。随机梯度 \(\nabla F(x_k;\xi_k)\) 的期望等于真实梯度 \(\nabla f(x_k)\)。直观理解:单次随机方向可能有偏差,但无数次尝试的平均方向是正确的——保证了 SGD 的大方向是对的。
假设 2(方差有界): \(\mathbb{E}[\|\nabla F(x_k;\xi_k)-\nabla f(x_k)\|^2\mid\mathcal{F}_k]\le\sigma^2\)。这限制了噪声大小,使随机梯度虽然有波动但不会失控。直观理解:虽然每次会走错路,但不会"错得离谱"。\(\sigma^2\) 描述了数据本身的噪声水平。
两者的协同作用: 无偏性保证了大方向正确(偏差在平均意义下相互抵消),方差有界保证了不会失控(配合学习率衰减可压制固定噪声 \(\sigma^2\),最终收敛)。
在该假设下,还可推出(讲义推导):
3.3 SGD(伪代码)¶
4 收敛分析:光滑(smooth)情形的三类目标¶
本节严格复现讲义(slides + Notes)中的核心结论与推导框架。默认采用欧几里得范数 \(\lVert\cdot\rVert\)。
4.1 准备:\(L\)-smooth 与标准不等式¶
定义 4.1(\(L\)-smooth)
函数 \(f:\mathbb{R}^d\to \mathbb{R}\) 若满足
则称 \(f\) 是 \(L\)-smooth(梯度 \(L\)-Lipschitz)。
一个常用等价形式是(对任意 \(x,y\)):
4.2 光滑非凸:收敛到“近似”驻点(stationary point)¶
定理 4.2(光滑非凸,常数步长)
假设 \(f\) 是 \(L\)-smooth 且满足假设 3.1。若 \(\gamma\le 1/L\),则 SGD 满足
其中 \(\Delta_0=f(x_0)-f^\star\),\(f^\star=\min_x f(x)\)。
该界表明:当步长为常数时,右端存在 \(\gamma L\sigma^2\) 的噪声地板(noise floor),因此只能收敛到近似驻点。
证明(与 Notes_SGD 一致)
由 \(L\)-smooth 不等式,取 \(x=x_k,\;y=x_{k+1}\),并对 \(\mathcal{F}_k\) 取条件期望:
代入 \(x_{k+1}-x_k=-\gamma \nabla F(x_k;\xi_k)\),得
由假设 3.1 的无偏性与方差界,可得
且
因此
若 \(\gamma\le 1/L\),则 \(1-\frac{L\gamma}{2}\ge \frac{1}{2}\),从而
再对 \(\mathcal{F}_k\) 取全期望并整理,得到
对 \(k=0,\ldots,K\) 求和并用望远镜求和(telescoping),且 \(\mathbb{E}[f(x_{K+1})]\ge f^\star\),得到结论。\(\square\)
推论 4.3(光滑非凸,调参后的平均梯度范数界)
在定理 4.2 条件下,取
则
4.3 非凸情形的解释:为什么只能保证“驻点”¶
讲义强调:非凸问题中,一般只能保证趋近满足 \(\nabla f(x)=0\) 的点,即驻点(stationary point)。驻点可能是局部最小、局部最大或鞍点;因此仅凭这类结果无法保证达到全局最优。
此外,经验上 SGD 在深度网络训练中表现很好;一些更深入的理论(讲义列举)说明 SGD 可能逃离鞍点、局部极大点,甚至某些“尖锐”的局部最小点,并在满足 Polyak–Łojasiewicz(PL)条件时可获得全局收敛性质,但这些内容在本讲中不展开。
4.4 光滑凸:目标值收敛(平均意义)¶
定理 4.4(光滑凸)
假设 \(f\) 凸且 \(L\)-smooth,并满足假设 3.1。若 \(\gamma\le \frac{1}{2L}\),则
其中 \(\Delta_0=\lVert x_0-x^\star\rVert^2\)。
若进一步选择
则有紧(tight)界
证明(与 Notes_SGD 的推导一致)
由 SGD 递推 \(x_{k+1}=x_k-\gamma \nabla F(x_k;\xi_k)\),展开平方距离并对 \(\mathcal{F}_k\) 取条件期望:
利用假设 3.1 得到
由凸性 \(f(x^\star)-f(x_k)\ge \langle \nabla f(x_k),x^\star-x_k\rangle\),以及光滑性蕴含的 \(\lVert \nabla f(x_k)\rVert^2 \le 2L(f(x_k)-f(x^\star))\),可推出
当 \(\gamma\le 1/(2L)\) 时,\(1-\gamma L\ge 1/2\),于是
移项、求和并望远镜求和即可得到主结论;再按 Notes 的方式选取 \(\gamma\) 得到调参界。\(\square\)
4.5 光滑强凸:线性收敛 + 噪声地板¶
定理 4.5(光滑强凸)
假设 \(f\) 为 \(\mu\)-strongly convex 且 \(L\)-smooth,并满足假设 3.1。若 \(\gamma\le 1/L\),则
其中 \(\Delta_0=f(x_0)-f^\star\)。
若进一步取
则
其中 \(\tilde O(\cdot)\) 隐去对数项。
证明(与 Notes_SGD 一致)
Notes 使用强凸性导出一个关键不等式:
把它代回非凸情形推导得到的递推式(对应 Notes 中式 (9) 与其后续整理),可得
迭代展开并用 \((1-x)\le e^{-x}\)(\(x\in(0,1)\))即可得到结论;再选择 Notes 中给出的 \(\gamma\),可得到 \(\tilde O(\cdot)\) 形式界。\(\square\)
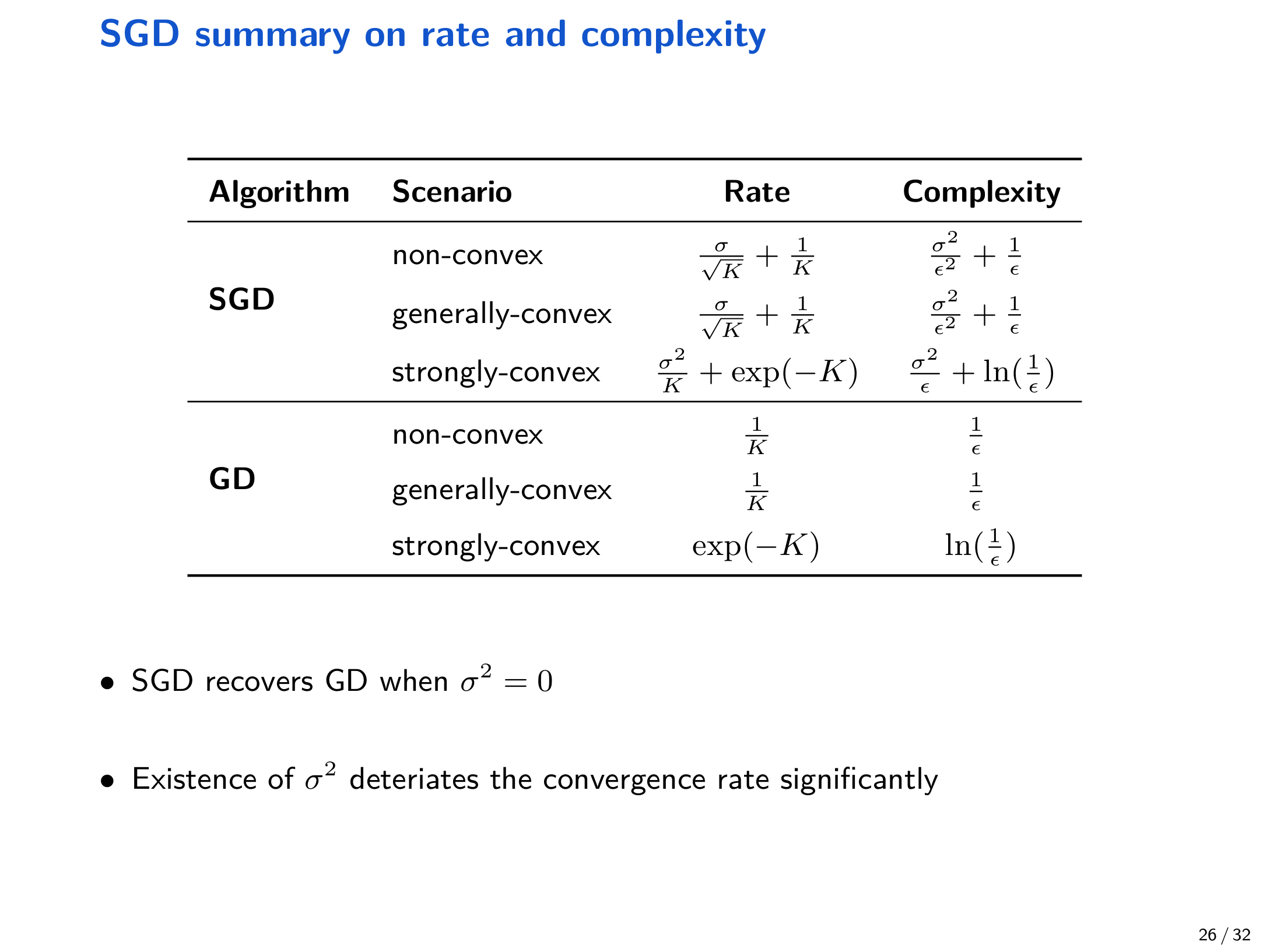
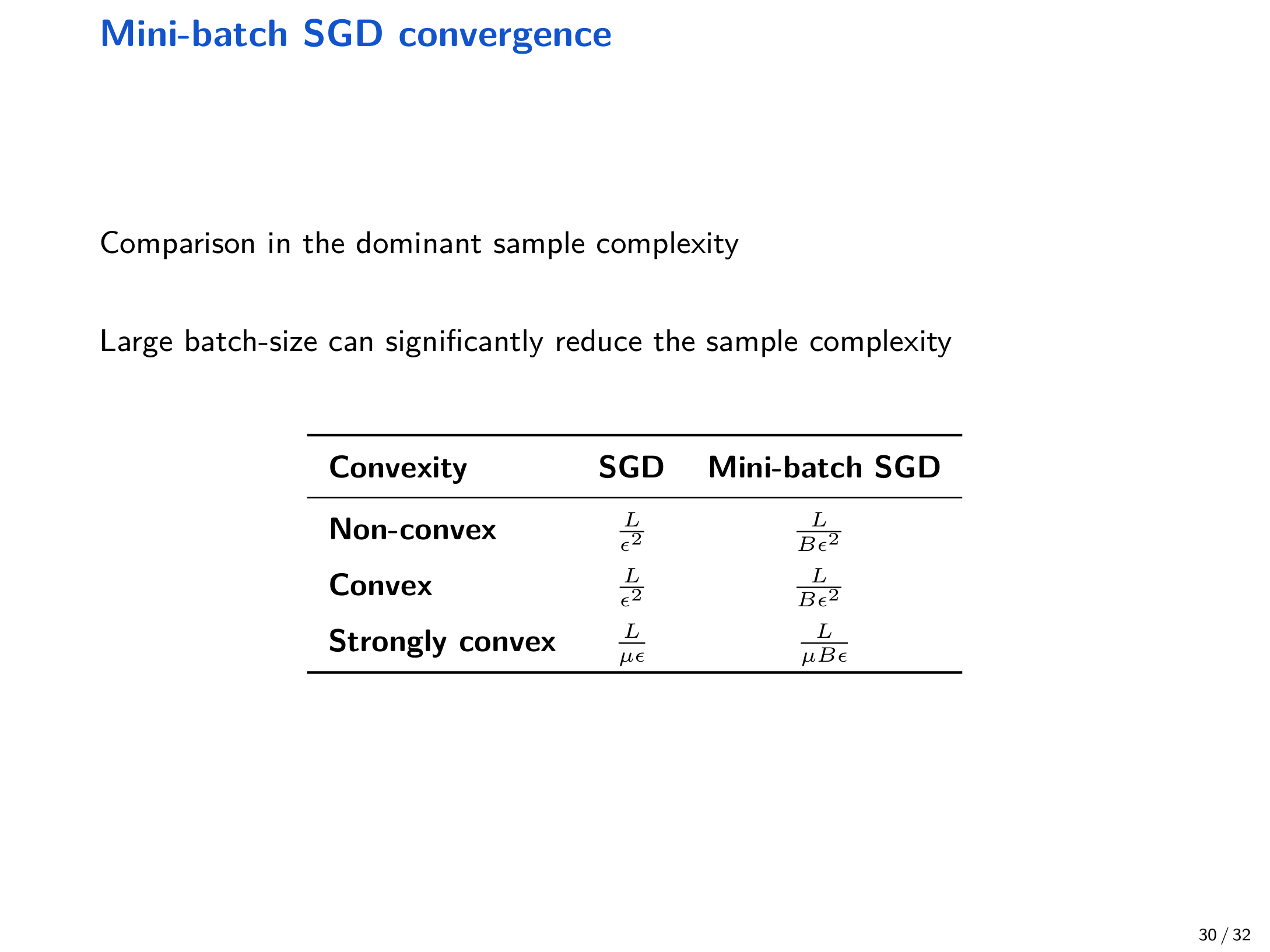
5 收敛率与样本复杂度总结¶
讲义给出了 SGD 与 GD 在不同凸性假设下的对比(强调噪声方差 \(\sigma^2\) 会显著恶化收敛率):
另一个角度是“dominant sample complexity”(达到精度 \(\varepsilon\) 所需样本量),在 mini-batch 章节给出了对比表格。
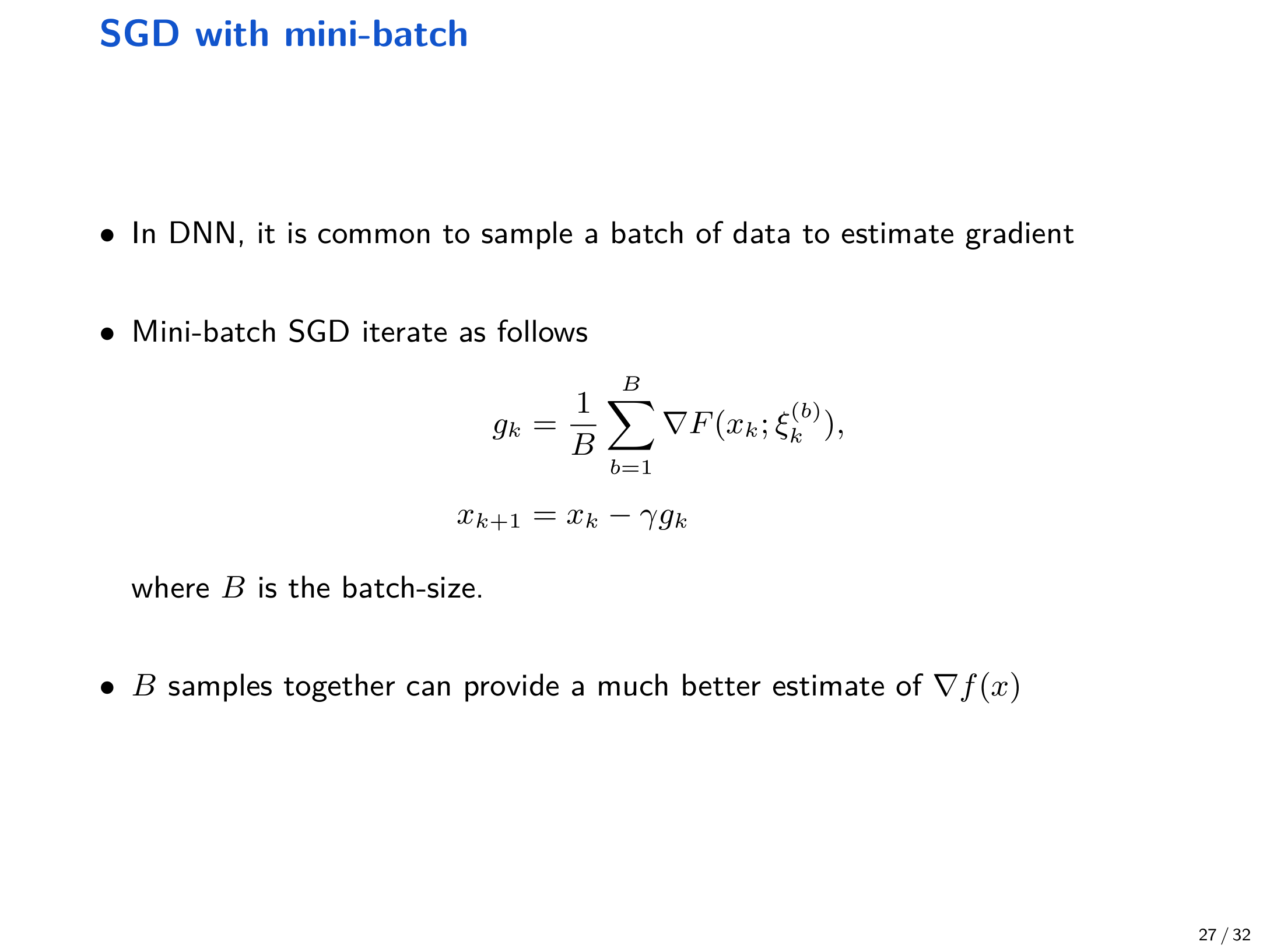
6 Mini-batch SGD:方差降低与并行加速¶
6.1 算法¶
在深度学习中通常用 batch size 为 \(B\) 的 mini-batch 来估计梯度。定义
则 mini-batch SGD 迭代为
对应的过滤族可写为:
假设 6.1(mini-batch 无偏 + 独立采样)
给定 \(\mathcal{F}^B_k\),对每个 \(b=1,\ldots,B\) 假设
并且 \(\{\xi^{(b)}_k\}_{b=1}^B\) 在给定 \(k\) 时相互独立。
6.2 方差降低:从 \(\sigma^2\) 到 \(\sigma^2/B\)¶
在假设 6.1 下,\(g_k\) 仍是无偏估计:
且方差满足(讲义与 Notes 的核心结论):
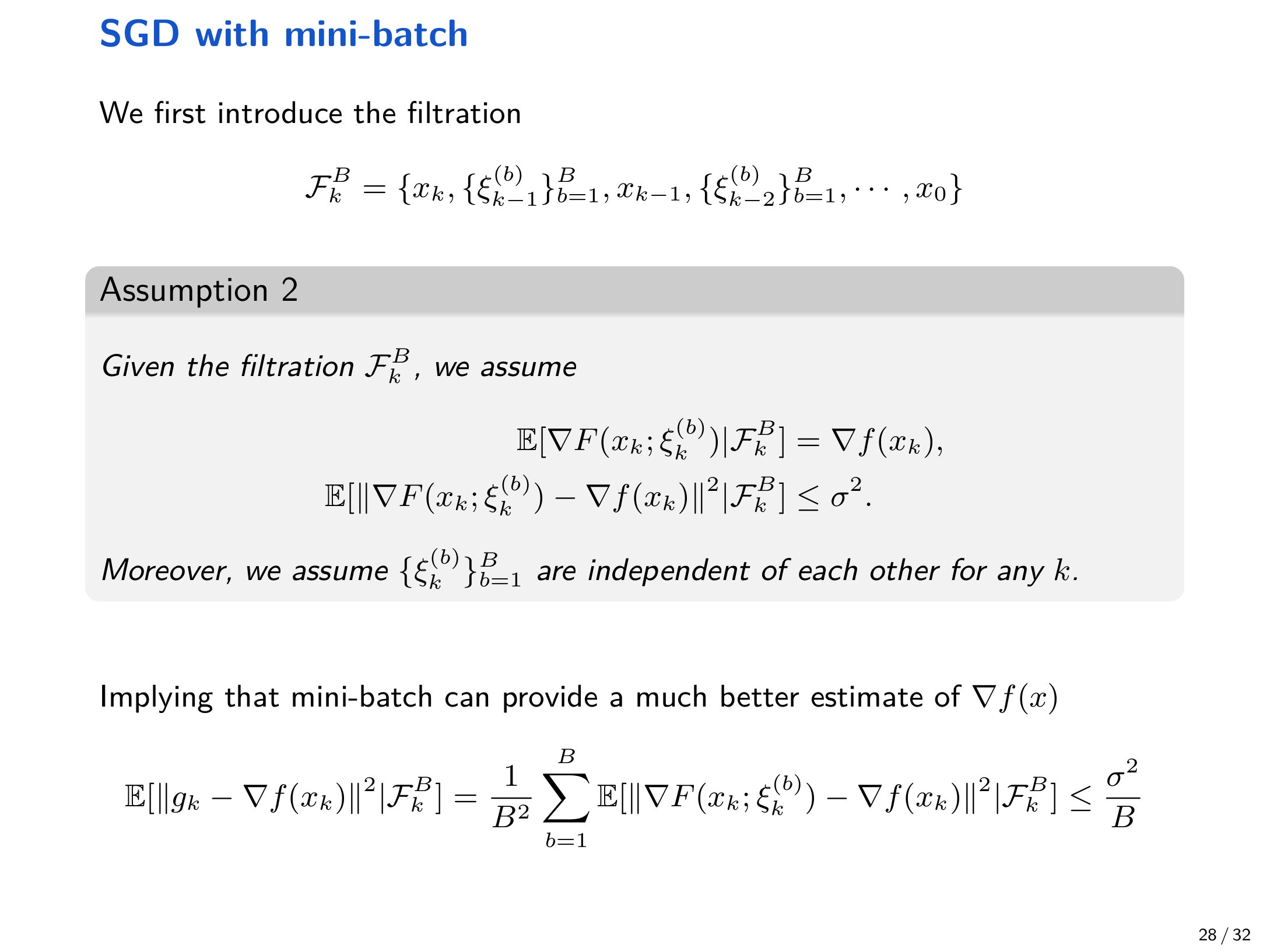
直观上:更大的 \(B\) 让一次更新使用更多样本,随机梯度噪声平均后变小,从而收敛更稳。
6.3 收敛结论(给出主导阶)¶
定理 6.2(mini-batch SGD 的主导阶)
在假设 6.1 下,mini-batch SGD 的收敛分析与 vanilla SGD 基本相同,只需把噪声方差从 \(\sigma^2\) 替换为 \(\sigma^2/B\)。讲义与 Notes 给出三类典型结果(这里写成主导阶):
- 若 \(f\) 是 \(L\)-smooth(可非凸),则
其中 \(\Delta^f_0=f(x_0)-f^\star\)。
- 若 \(f\) 是 \(L\)-smooth 且凸,则
其中 \(\Delta^x_0=\lVert x_0-x^\star\rVert^2\)。
- 若 \(f\) 是 \(L\)-smooth 且 \(\mu\)-strongly convex,则
其中 \(\tilde O(\cdot)\) 隐去对数项。
讲义特别指出:更大的 batch size \(B\) 会加速收敛,且 \(B=1\) 退化回 vanilla SGD。
讲义进一步给出在“主导样本复杂度”层面的对比:
7 实验现象:学习率与 batch size 的影响¶
本节复现 Notes_SGD 中的实验设计与结论(线性回归 + CIFAR-10 / ResNet-18)。
7.1 线性回归:学习率大小与收敛行为¶
Notes 在线性回归任务中(\(N=100,\;d=5\),batch size 为 \(1\),epochs 为 \(10\))比较了不同学习率。
结论要点:
- 学习率更小:更新更谨慎稳定,最终收敛更好,但训练更慢。
- 适当增大学习率:加速训练,但可能牺牲最终收敛效果。
- 学习率过大:可能导致震荡、甚至发散。
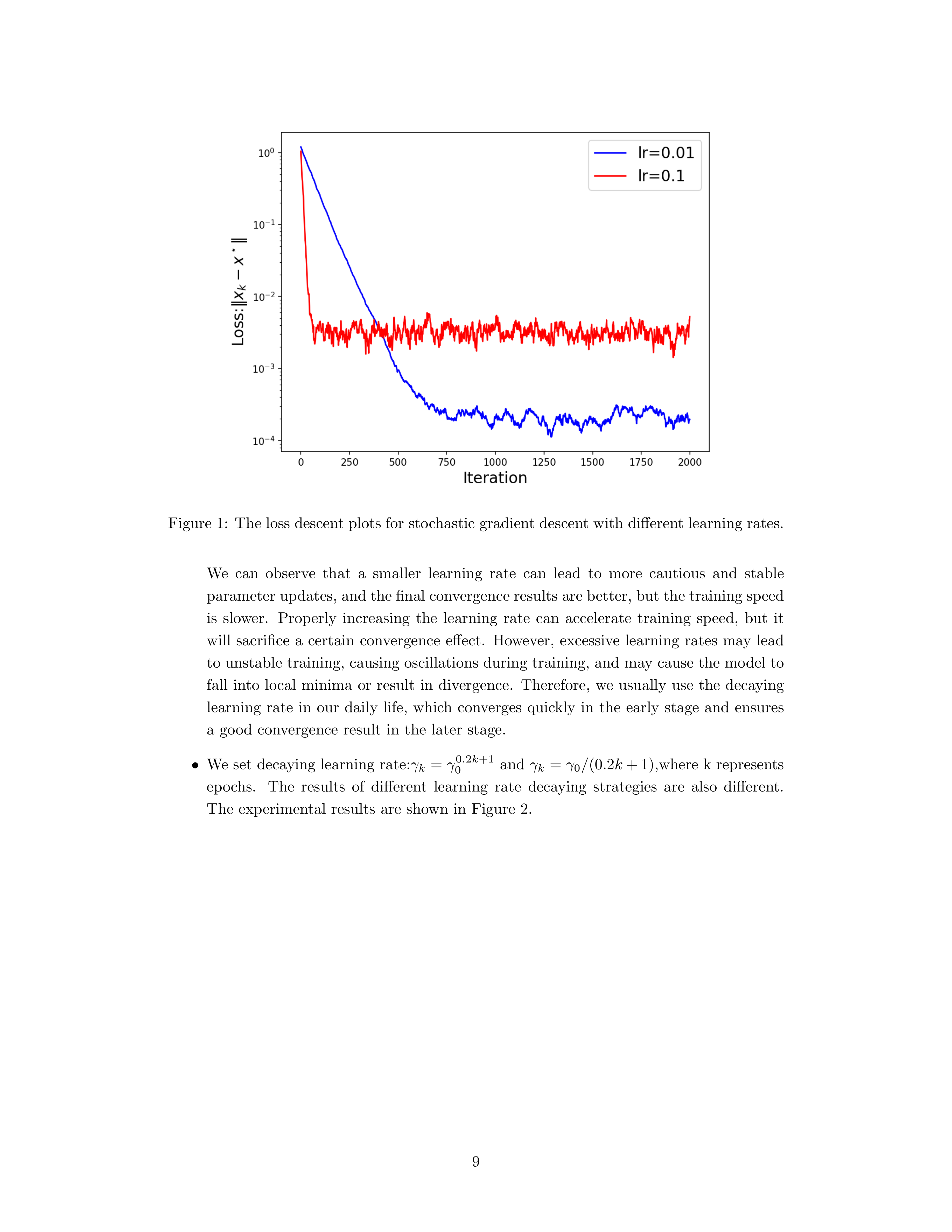
7.2 学习率衰减(learning rate decay)¶
Notes 给出两种衰减策略示例:
- \(\gamma_k=\gamma_0^{0.2k+1}\)
- \(\gamma_k=\gamma_0/(0.2k+1)\)
并指出不同衰减策略会带来不同训练曲线。
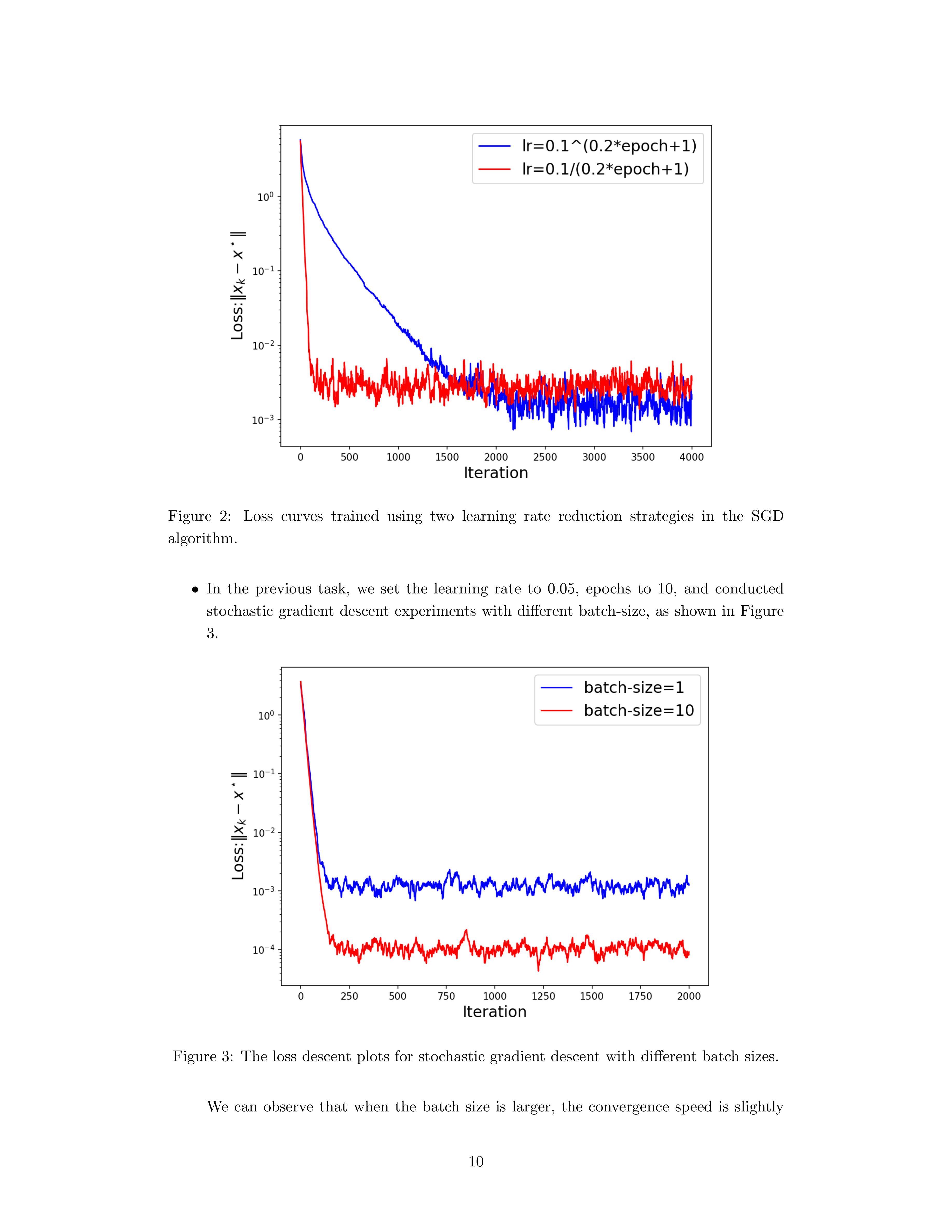
7.3 batch size 的影响:更快更稳的趋势¶
Notes 在固定学习率(例如 \(0.05\))下比较不同 batch size 的线性回归实验,并观察到更大的 batch size 往往带来略快且更好的收敛效果,其原因是每次更新使用的数据更多、更接近整体梯度。
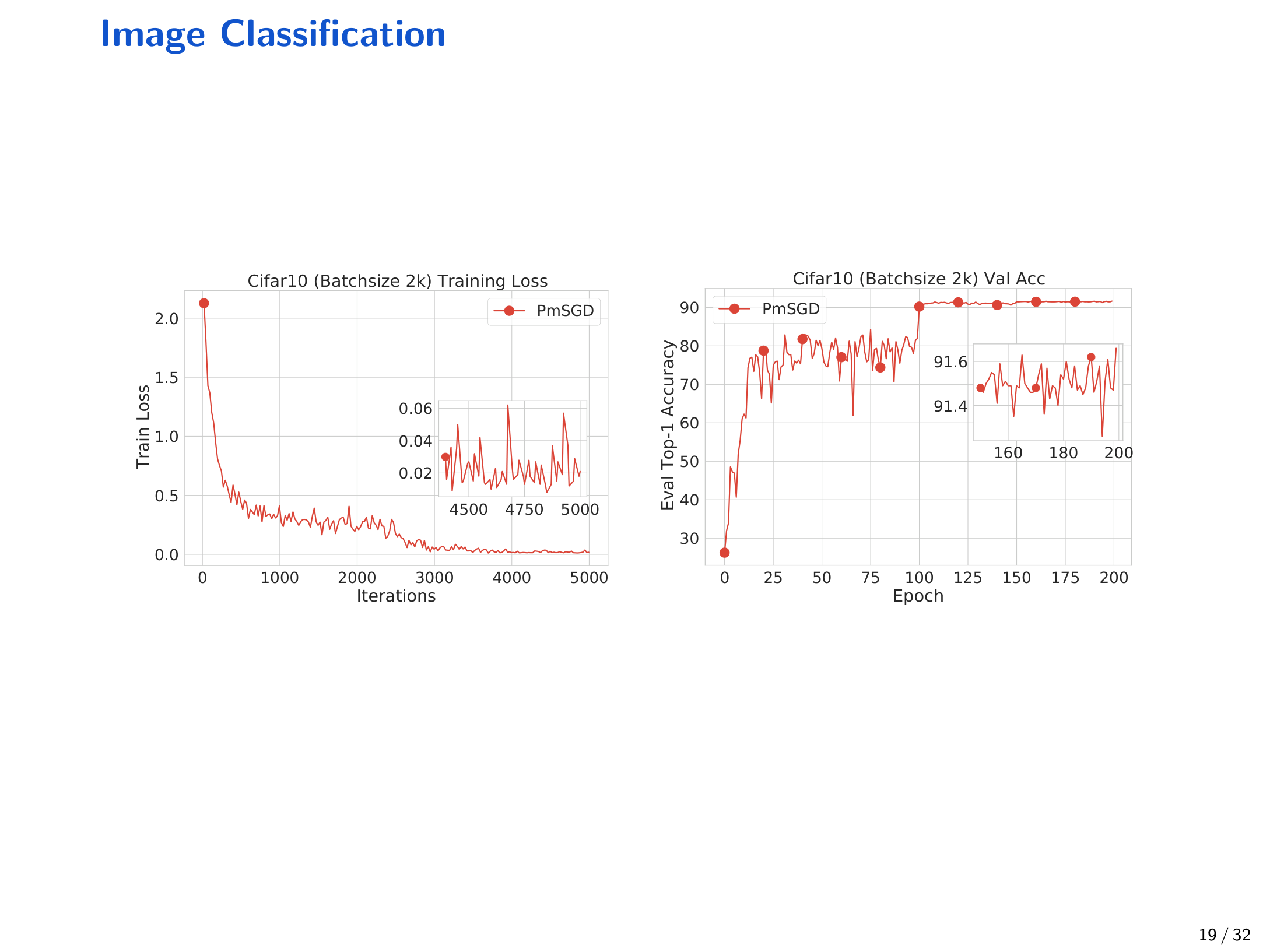
在 CIFAR-10 上用 ResNet-18 做分类实验,讲义与 Notes 都强调 “large batch can help training” 的现象;例如讲义展示了 batch size 约为 \(2k\) 的训练损失与验证精度曲线:
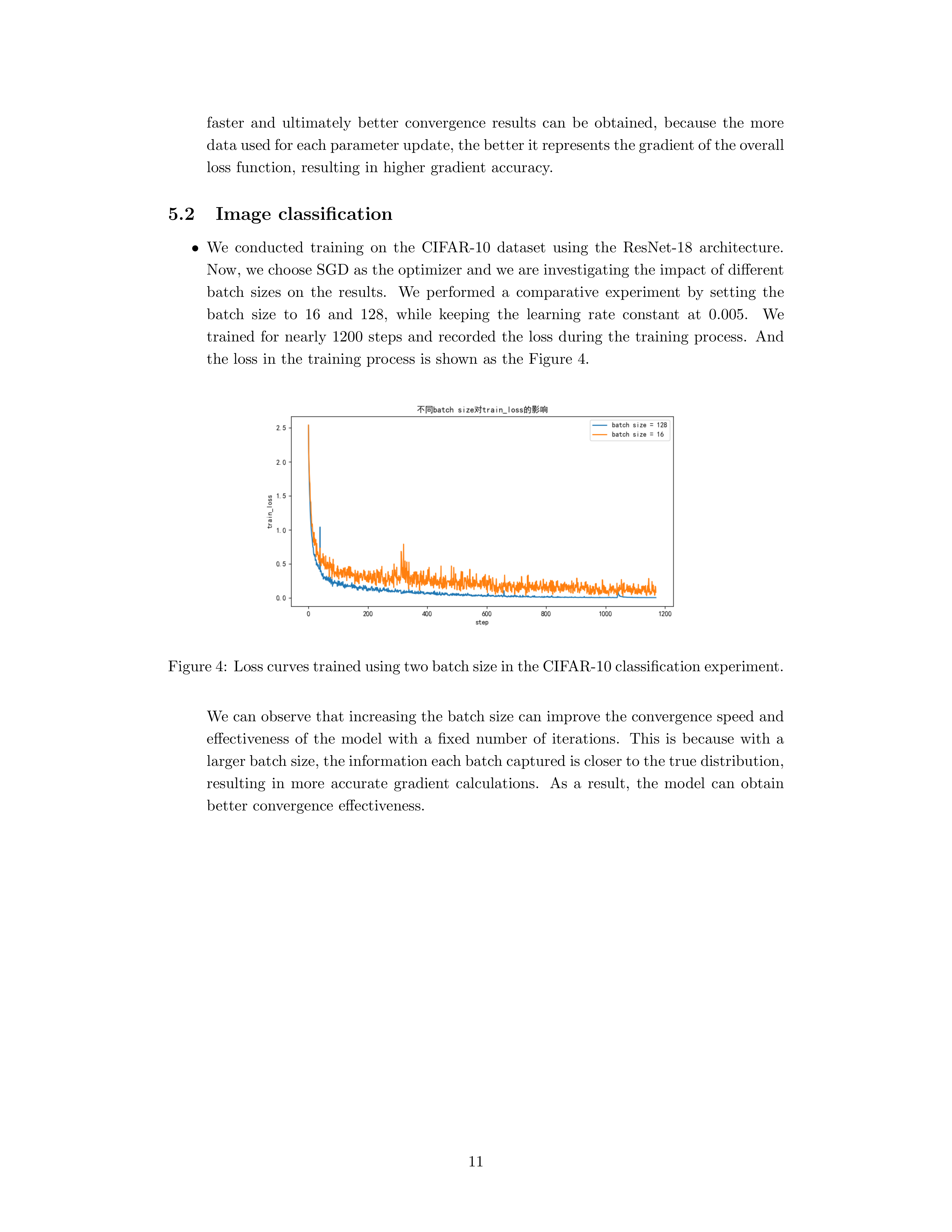
Notes 进一步比较 batch size 为 \(16\) 与 \(128\)(学习率固定为 \(0.005\),训练约 \(1200\) steps)时的 loss 曲线:
8 参考文献(讲义列举)¶
- Ge, Huang, Jin, Yuan (2015). Escaping from saddle points—online stochastic gradient for tensor decomposition. COLT.
- Sun, Qu, Wright (2015). When are nonconvex problems not scary? arXiv:1510.06096.
- Jin, Ge, Netrapalli, Kakade, Jordan (2017). How to escape saddle points efficiently. ICML.
- Du, Zhai, Poczos, Singh (2018). Gradient descent provably optimizes over-parameterized neural networks. arXiv:1810.02054.
- Du, Lee, Li, Wang, Zhai (2019). Gradient descent finds global minima of deep neural networks. ICML.
- Kleinberg, Li, Yuan (2018). An alternative view: When does sgd escape local minima? ICML.
- Karimi, Nutini, Schmidt (2016). Linear convergence of gradient and proximal-gradient methods under the Polyak-Łojasiewicz condition. ECML PKDD.